Let's have some fun!
Hello everyone! This time we are going to estimate the parameters of a first order system from experimental data. For this experiment we use Scilab, Arduino and a RC circuit.
We start from the physical system as shown in the following figure 1. A $10 \space K\Omega$ resistor and a $100 \space \mu F$ capacitor are chosen.
 |
| Figure 1. RC Circuit. |
The connections are shown in Figure 2.
 |
| Figure 2. RC Circuit Connections. |
The circuit diagram is shown in Fig 3.
 |
| Figure 3. RC Circuit Diagram. |
To obtain the differential equation of the circuit we use the resistor and capacitor $v-i$ relationships.
$Eq \space 1. \qquad V_R=iR$
$Eq \space 2. \qquad i=C \space \dot{V_C}$
Then, KVL
$Eq \space 3. \qquad -V_S+V_R+V_C=0$
By subtituting $Eq \space 2$ in $Eq \space 1$ and the result in $Eq \space 3$, we obtain the differential equation of the system.
$Eq \space 4. \qquad RC \; \dot{V_C}+V_C=V_S$
Assuming zero initial conditions and applying the Laplace transform, we obtain the transfer function of the system.
$Eq \space 5. \qquad G(s) = \frac{V_C(s)}{V_S(s)}= \frac{1}{RC \space s+1}$
Analysis:
 |
| Figura 4. Open Loop System Block Diagram. |
The step response of the open loop system is obtained as follows:
$Eq \space 6. \qquad V_C(s)=G(s) \cdot V_S(s)=\frac{1}{RC \space s+1} \cdot \frac{1}{s}$
If we substitute the values of $R=10 K\Omega$ and $C=100 \mu F$ in $Eq \space 6$ and then do the Partial-Fraction Expansion
$\hspace{42pt} V_C(s)=\frac{A}{s+1} + \frac{B}{s}$
$\hspace{42pt} A=\begin{equation} \left. {\frac{1}{s}}\right\rvert_{s=-1} \end{equation}= -1$
$\hspace{42pt} B=\begin{equation} \left. {\frac{1}{s+1}}\right\rvert_{s=0} \end{equation} = 1$
we get
$Eq \space 7. \qquad V_C(s)=\frac{-1}{s+1} + \frac{1}{s}$
applying the inverse Laplace transform to $Eq \space 7$
$Eq \space 8. \qquad \begin{equation} V_C(t)=1 - e^{-t}\end{equation}$
The step response to the system of $Eq \space 8$ is shown in Figure 5.
 |
| Figure 5. RC Circuit Step Response (Eq 8). |
Experiment:
Now, we use Scilab to acquire the data from the real system. The program is shown in Figure 6. We declare a sample time $Ts=0.02\,s$ for the data acquisition.
 |
| Figure 6. Scilab Xcos Data Acquisition Program. |
The experiment consist of exciting the system with 5 volts from $t=0$ to $t=10$ seconds and the data is saved in the variable rcdata. The Experimental Input-Output Data is shown in Figure 7.
 |
| Figure 7. RC Circuit Experimental Input-Output Data. |
As we can see, the first ten seconds of the Output in Fig 7 are similar to the Fig 5.
Identification:
To obtain the transfer function with the estimated parameters we need two things:
1. The steady state value.
2. The transient due to initial conditions.
 |
| Figure 8. Parameter Estimation. |
The steady state value is used to identify the transfer function gain as follows.
$Eq \space 9. \qquad \begin{equation} K_{RC}= \frac{output
\,at\,steady\,state}{input\,at\,steady\,state}=\frac{4.9902}{5}=0.9980\end{equation}$
The free response due to initial condition is the data at $t>10$ seconds shown in Fig 8. This data is used to identify the system time constant $\tau$.
$Eq \space 10. \qquad \begin{equation} \tau=RC= \frac{t_1-t_2}{\ln\left [\frac{c\,(t_2)}{c\,(t_1)} \right ] } = \frac{10.4396-10.9782}{\ln\left [\frac{2.2976}{3.7157} \right ] } = 1.12\,sec \end{equation}$
So, the system transfer function is
$Eq \space 11. \qquad \begin{equation} G(s)=\frac{0.9980}{1.12\,s\,+\,1} \end{equation}$
Validation:
To validate the model, we excite the system of $Eq\,11$ with the same input of the experiment, and plot it against the output of the experiment. For this purpose we use the following Xcos program
 |
| Figure 9. Xcos Model Validation Program. |
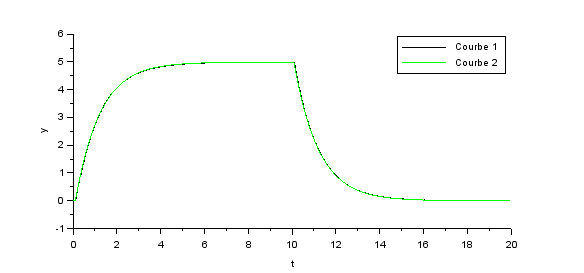
and the result is shown in the following figure
 |
| Figure 10. Model Validation Plot. |
As we can see in Figure 10, the model plot (green curve) is almost superposed to the experimental data (black curve). For this reason, the transfer function of $Eq\,11$ pretty much describes the system dynamics.








{kind=link}